Lab 4.4: Deploy da Automação
Esta etapa do treinamento é focada no build e deploy do robô, criação de uma tarefa e execução via BotCity Runner.
Build e Deploy do robô
Esta etapa do treinamento é focada no build e deploy do robô, criação de uma tarefa e execução via BotCity Runner.
Dica
Mais informações sobre o Orquestrador BotCity podem ser encontradas aqui.
Build do robô
Para realizar o processo de build, basta compactar o projeto com os arquivos bot.py, requirements.txt e qualquer outro arquivo ou pasta que esteja utilizando no código, formando um novo arquivo chamado bot-candidato.zip.
Atenção
Se você estiver utilizando um ambiente virtual para desenvolvimento, como um venv, não há necessidade de incluí-lo no arquivo bot-candidato.zip.
Outra opção é executar um dos scripts existentes na pasta de acordo seu sistema operacional, você pode executar o build.bat, build.ps1 ou build.sh
Atenção - Linux e macOS
Caso você receba uma mensagem de erro relacionada a permissões, certifique-se que seu arquivo build.sh
tem as permissões de execução configuradas.
Para atribuir permissão de execução faça:
chmod +x build.sh
Deploy de uma automação
O Orquestrador BotCity possui um modo guiado para o deploy de novas automações chamado Easy Deploy.
Você pode acessar essa funcionalidade através do botão Easy Deploy no menu principal da aplicação:

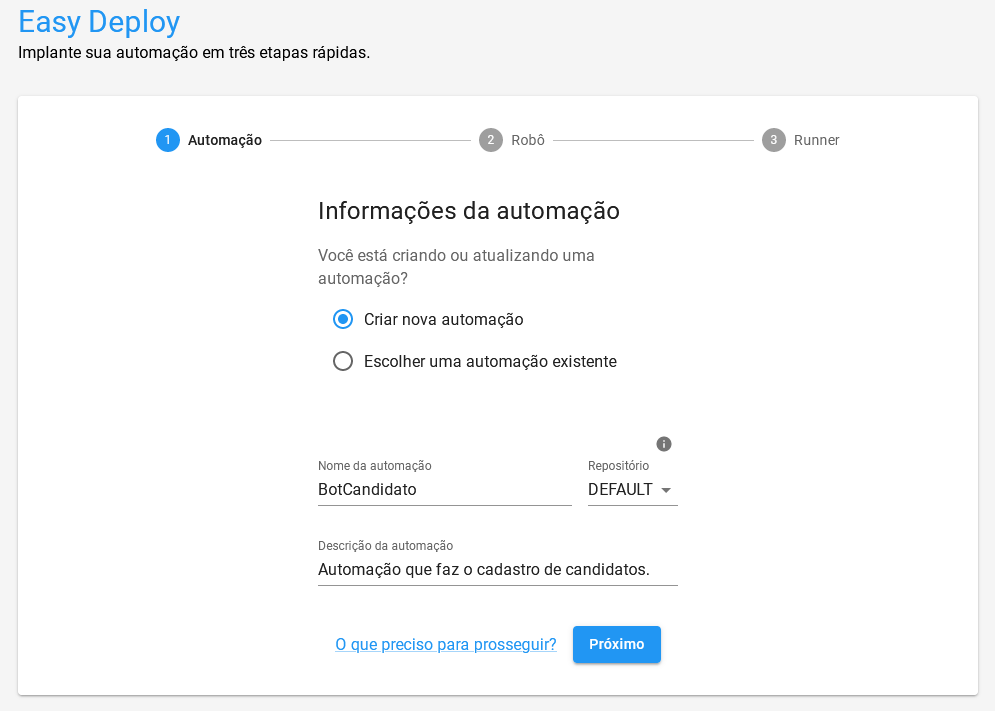
Passo 1. Criar a automação
Nesta etapa nomeie a automação preenchendo o campo com BotCandidato e clique em Próximo.
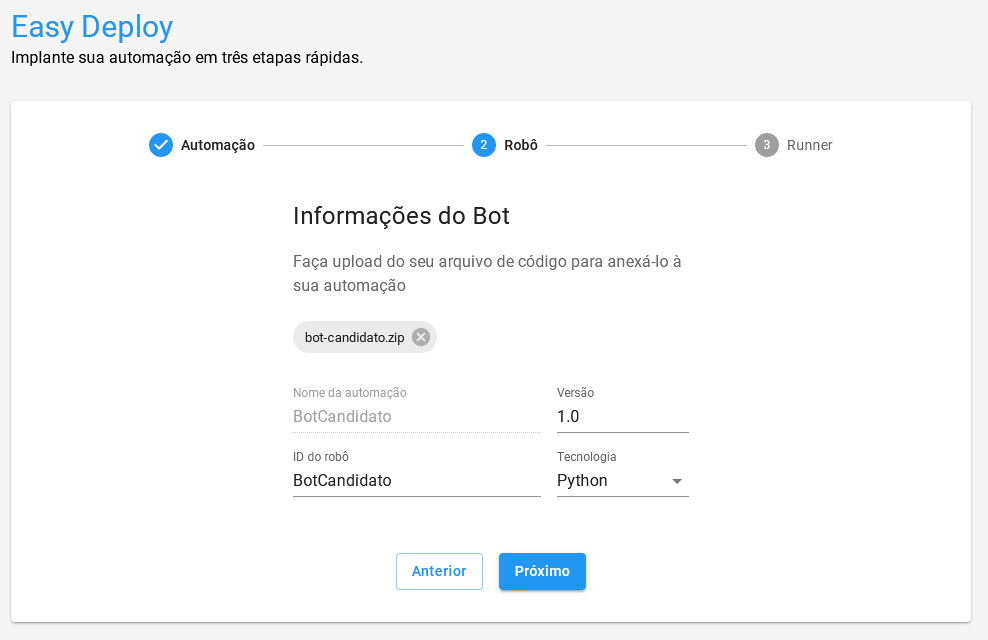
Passo 2. Enviar o robô
Nesta etapa preencha as seguintes informações para enviar nosso robô para a plataforma e clique em Próximo:
- Bot ID:
BotCandidato - Versão:
1.0 - Tecnologia:
Python - Repositório:
DEFAULT - Envio do arquivo: Selecione o
bot-candidato.zip
Seu formulário deve ficar semelhante à imagem abaixo:
Passo 3. Onde executar
Nesta etapa defina em quais instâncias de BotCity Runner a automação pode ser executada e clique em Deploy.
Dica
Como o Datapool é um gerenciador de itens individuais, você pode ter mais de um Runner executando diferentes automações e iterando sobre o mesmo Datapool. Desta forma, é possível escalar o processamento desses itens.
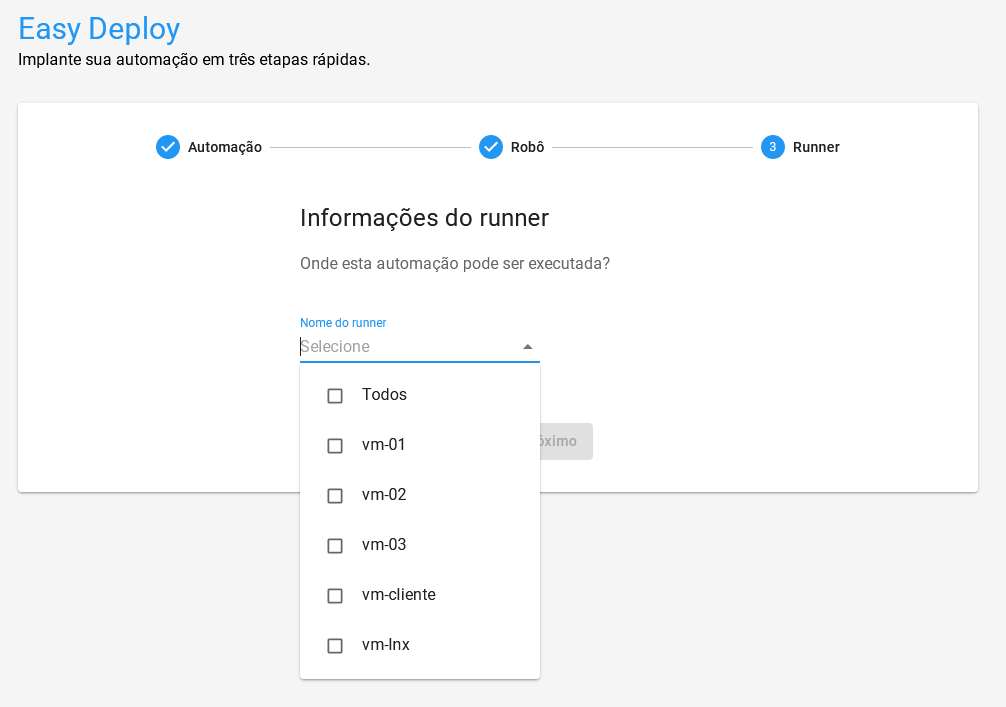
Nesse momento, você pode selecionar o Runner que foi criado na etapa de instalação do SDK: Lab 2: Setup e configuração - BotCity Studio SDK.
Caso desejar, você também pode criar um novo Runner, preenchendo um identificador no campo abaixo.
Importante
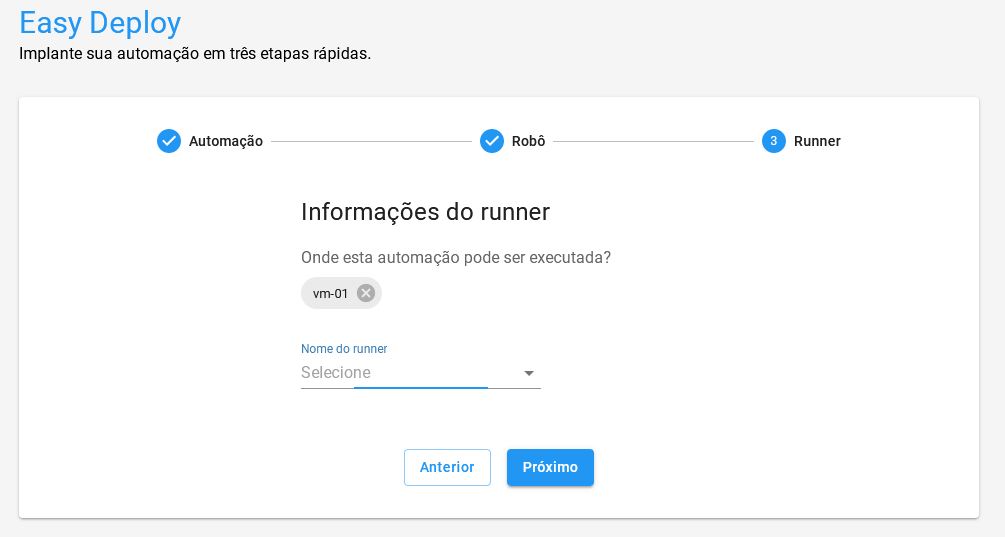
O valor configurado acima deve ser indicado na propriedade machineId do arquivo conf.bcf.
Mais detalhes no Lab 1.2: Setup e configuração - BotCity Studio SDK
Seu formulário deve ficar semelhante à imagem abaixo:
Deploy realizado com sucesso! 🏆
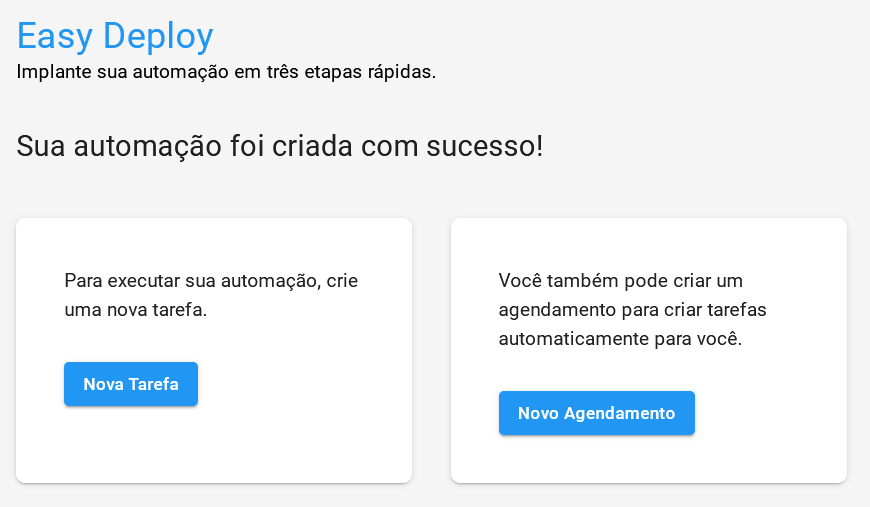
Agora, crie uma tarefa para ser executada através do Orquestrador BotCity.
Criar uma tarefa
Partindo da tela anterior, clique no botão Nova tarefa para ser redirecionado para o formulário de criação de tarefa para a automação:
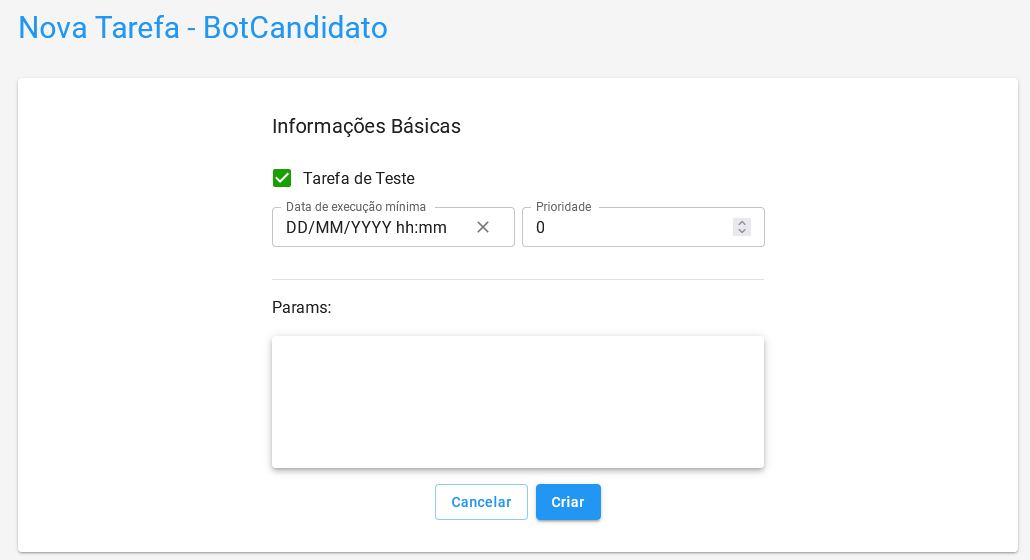
Acesse a documentação para ver mais detalhes sobre as opções que podem ser definidas ao criar uma nova tarefa.
Nesta tela, marque o campo Tarefa de Teste e clique em Criar, isso significa que esta tarefa pode ser reiniciada quantas vezes forem necessárias.
Dica
Tarefas de teste são extremamente úteis durante o processo de desenvolvimento de uma automação.
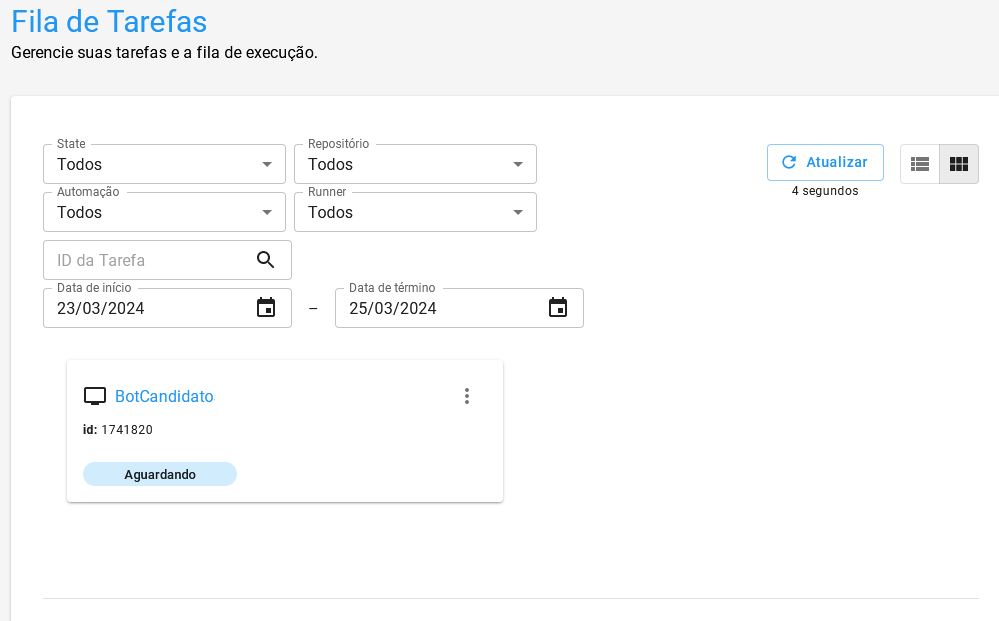
Assim uma nova tarefa entra para a fila de execução. Acompanhe no menu Fila de Tarefas:
Atualizar um robô existente
Como parte do ciclo de desenvolvimento, é comum sobrescrever uma versão ou atualizar um código de um robô existente no Orquestrador BotCity.
Para isso, siga as instruções da documentação: Atualizar um robô existente.